
Know What Your Neighbors Do: 3D Semantic Segmentation of Point Clouds
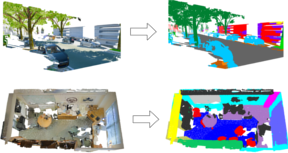
In this paper, we present a deep learning architecture which addresses the problem of 3D semantic segmentation of unstructured point clouds. Compared to previous work, we introduce grouping techniques which define point neighborhoods in the initial world space and the learned feature space. Neighborhoods are important as they allow to compute local or global point features depending on the spatial extend of the neighborhood. Additionally, we incorporate dedicated loss functions to further structure the learned point feature space: the pairwise distance loss and the centroid loss. We show how to apply these mechanisms to the task of 3D semantic segmentation of point clouds and report state-of-the-art performance on indoor and outdoor datasets.
@inproceedings{3dsemseg_ECCVW18,
author = {Francis Engelmann and
Theodora Kontogianni and
Jonas Schult and
Bastian Leibe},
title = {Know What Your Neighbors Do: 3D Semantic Segmentation of Point Clouds},
booktitle = {{IEEE} European Conference on Computer Vision, GMDL Workshop, {ECCV}},
year = {2018}
}
