
Probabilistic Parameter Selection for Learning Scene Structure from Video
British Machine Vision Conference (BMVC'08)
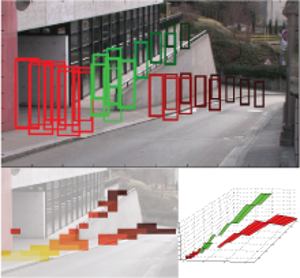
We present an online learning approach for robustly combining unreliable observations from a pedestrian detector to estimate the rough 3D scene geometry from video sequences of a static camera. Our approach is based on an entropy modelling framework, which allows to simultaneously adapt the detector parameters, such that the expected information gain about the scene structure is maximised. As a result, our approach automatically restricts the detector scale range for each image region as the estimation results become more confident, thus improving detector run-time and limiting false positives.
