
Real-Time Multi-Person Tracking with Time-Constrained Detection
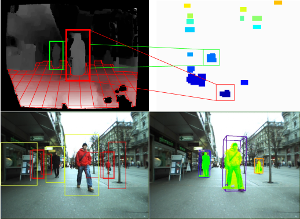
This paper presents a robust real-time multi-person tracking framework for busy street scenes. Tracking-by-detection approaches have recently been successfully applied to this task. However, their run-time is still limited by the computationally expensive object detection component. In this paper, we therefore consider the problem of making best use of an object detector with a fixed and very small time budget. The question we ask is: given a fixed time budget that allows for detector-based verification of k small regions-of-interest (ROIs) in the image, what are the best regions to attend to in order to obtain stable tracking performance? We address this problem by applying a statistical Poisson process model in order to rate the urgency by which individual ROIs should be attended to. These ROIs are initially extracted from a 3D depth-based occupancy map of the scene and are then tracked over time. This allows us to balance the system resources in order to satisfy the twin goals of detecting newly appearing objects, while maintaining the quality of existing object trajectories.
@inproceedings{DBLP:conf/bmvc/MitzelSL11,
author = {Dennis Mitzel and
Patrick Sudowe and
Bastian Leibe},
title = {Real-Time Multi-Person Tracking with Time-Constrained Detection},
booktitle = {British Machine Vision Conference, {BMVC} 2011, Dundee, UK, August
29 - September 2, 2011. Proceedings},
pages = {1--11},
year = {2011},
crossref = {DBLP:conf/bmvc/2011},
url = {http://dx.doi.org/10.5244/C.25.104},
doi = {10.5244/C.25.104},
timestamp = {Wed, 24 Apr 2013 17:19:07 +0200},
biburl = {http://dblp.uni-trier.de/rec/bib/conf/bmvc/MitzelSL11},
bibsource = {dblp computer science bibliography, http://dblp.org}
}
