
Real Time Vision Based Multi-person Tracking for Mobile Robotics and Intelligent Vehicles
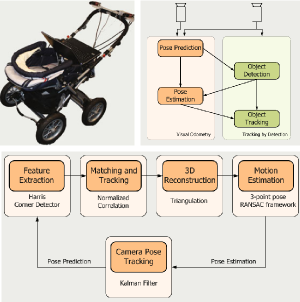
In this paper, we present a real-time vision-based multiperson tracking system working in crowded urban environments. Our approach combines stereo visual odometry estimation, HOG pedestrian detection, and multi-hypothesis tracking-by-detection to a robust tracking framework that runs on a single laptop with a CUDA-enabled graphics card. Through shifting the expensive computations to the GPU and making extensive use of scene geometry constraints we could build up a mobile system that runs with 10Hz. We experimentally demonstrate on several challenging sequences that our approach achieves competitive tracking performance.
@inproceedings{DBLP:conf/icira/MitzelFSZL11,
author = {Dennis Mitzel and
Georgios Floros and
Patrick Sudowe and
Benito van der Zander and
Bastian Leibe},
title = {Real Time Vision Based Multi-person Tracking for Mobile Robotics and
Intelligent Vehicles},
booktitle = {Intelligent Robotics and Applications - 4th International Conference,
{ICIRA} 2011, Aachen, Germany, December 6-8, 2011, Proceedings, Part
{II}},
pages = {105--115},
year = {2011},
crossref = {DBLP:conf/icira/2011-2},
url = {http://dx.doi.org/10.1007/978-3-642-25489-5_11},
doi = {10.1007/978-3-642-25489-5_11},
timestamp = {Fri, 02 Dec 2011 12:36:17 +0100},
biburl = {http://dblp.uni-trier.de/rec/bib/conf/icira/MitzelFSZL11},
bibsource = {dblp computer science bibliography, http://dblp.org}
}
