
Motion Cooperation: Smooth Piece-Wise Rigid Scene Flow from RGB-D Images
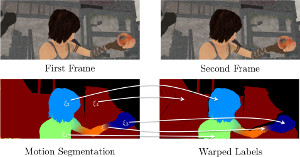
We propose a novel joint registration and segmentation approach to estimate scene flow from RGB-D images. In- stead of assuming the scene to be composed of a number of independent rigidly-moving parts, we use non-binary labels to capture non-rigid deformations at transitions between the rigid parts of the scene. Thus, the velocity of any point can be computed as a linear combination (interpolation) of the estimated rigid motions, which provides better results than traditional sharp piecewise segmentations. Within a variational framework, the smooth segments of the scene and their corresponding rigid velocities are alternately re- fined until convergence. A K-means-based segmentation is employed as an initialization, and the number of regions is subsequently adapted during the optimization process to capture any arbitrary number of independently moving ob- jects. We evaluate our approach with both synthetic and real RGB-D images that contain varied and large motions. The experiments show that our method estimates the scene flow more accurately than the most recent works in the field, and at the same time provides a meaningful segmentation of the scene based on 3D motion.
@inproceedings{jaimez15_mocoop,
author= {M. Jaimez and M. Souiai and J. Stueckler and J. Gonzalez-Jimenez and D. Cremers},
title = {Motion Cooperation: Smooth Piece-Wise Rigid Scene Flow from RGB-D Images},
booktitle = {Proc. of the Int. Conference on 3D Vision (3DV)},
month = oct,
year = 2015,
}
