
Publications
Fine-Tuning Image-Conditional Diffusion Models is Easier than You Think
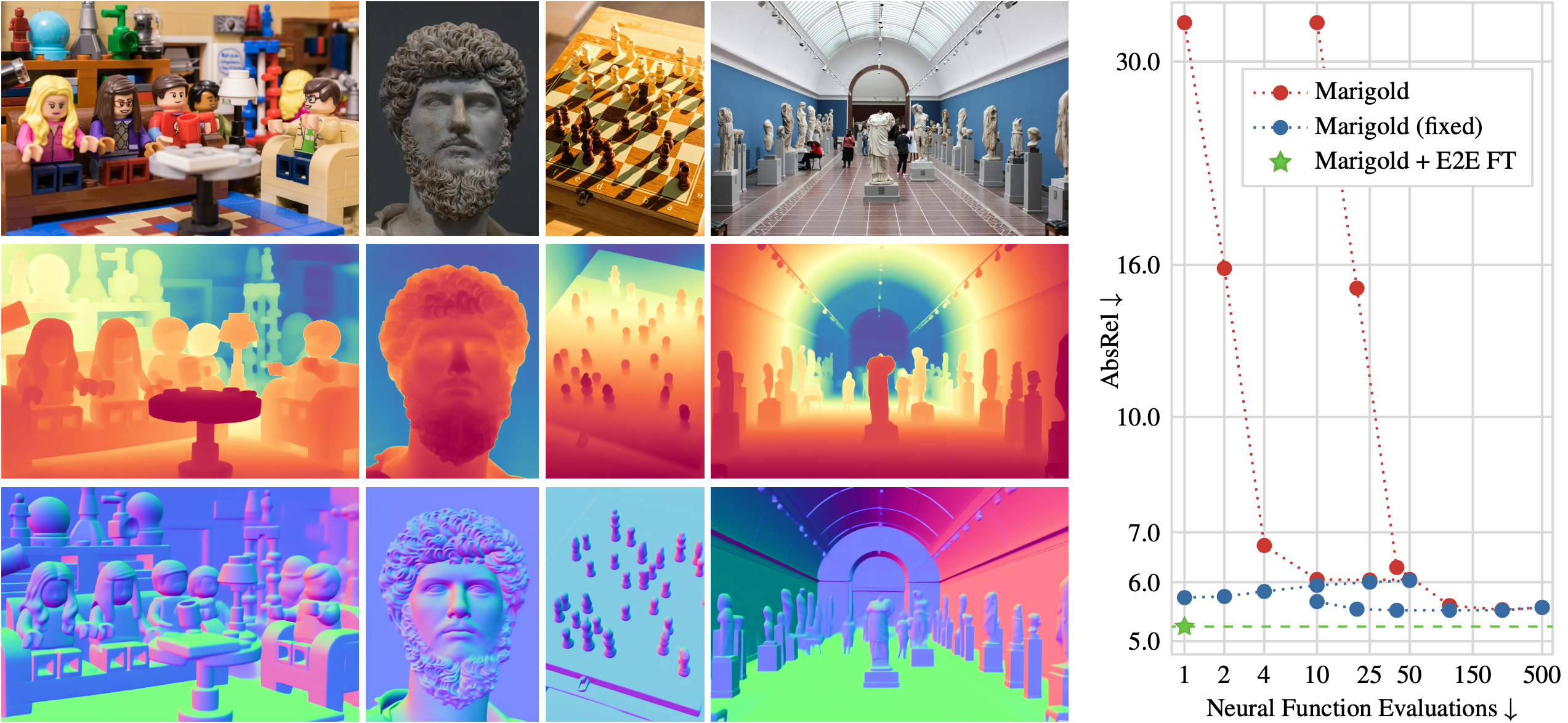
Recent work showed that large diffusion models can be reused as highly precise monocular depth estimators by casting depth estimation as an image-conditional image generation task. While the proposed model achieved state-of-the-art results, high computational demands due to multi-step inference limited its use in many scenarios. In this paper, we show that the perceived inefficiency was caused by a flaw in the inference pipeline that has so far gone unnoticed. The fixed model performs comparably to the best previously reported configuration while being more than 200x faster. To optimize for downstream task performance, we perform end-to-end fine-tuning on top of the single-step model with task-specific losses and get a deterministic model that outperforms all other diffusion-based depth and normal estimation models on common zero-shot benchmarks. We surprisingly find that this fine-tuning protocol also works directly on Stable Diffusion and achieves comparable performance to current state-of-the-art diffusion-based depth and normal estimation models, calling into question some of the conclusions drawn from prior works.
@article{martingarcia2024diffusione2eft,
title = {Fine-Tuning Image-Conditional Diffusion Models is Easier than You Think},
author = {Martin Garcia, Gonzalo and Abou Zeid, Karim and Schmidt, Christian and de Geus, Daan and Hermans, Alexander and Leibe, Bastian},
journal = {arXiv preprint arXiv:2409.11355},
year = {2024}
}
Interactive4D: Interactive 4D LiDAR Segmentation
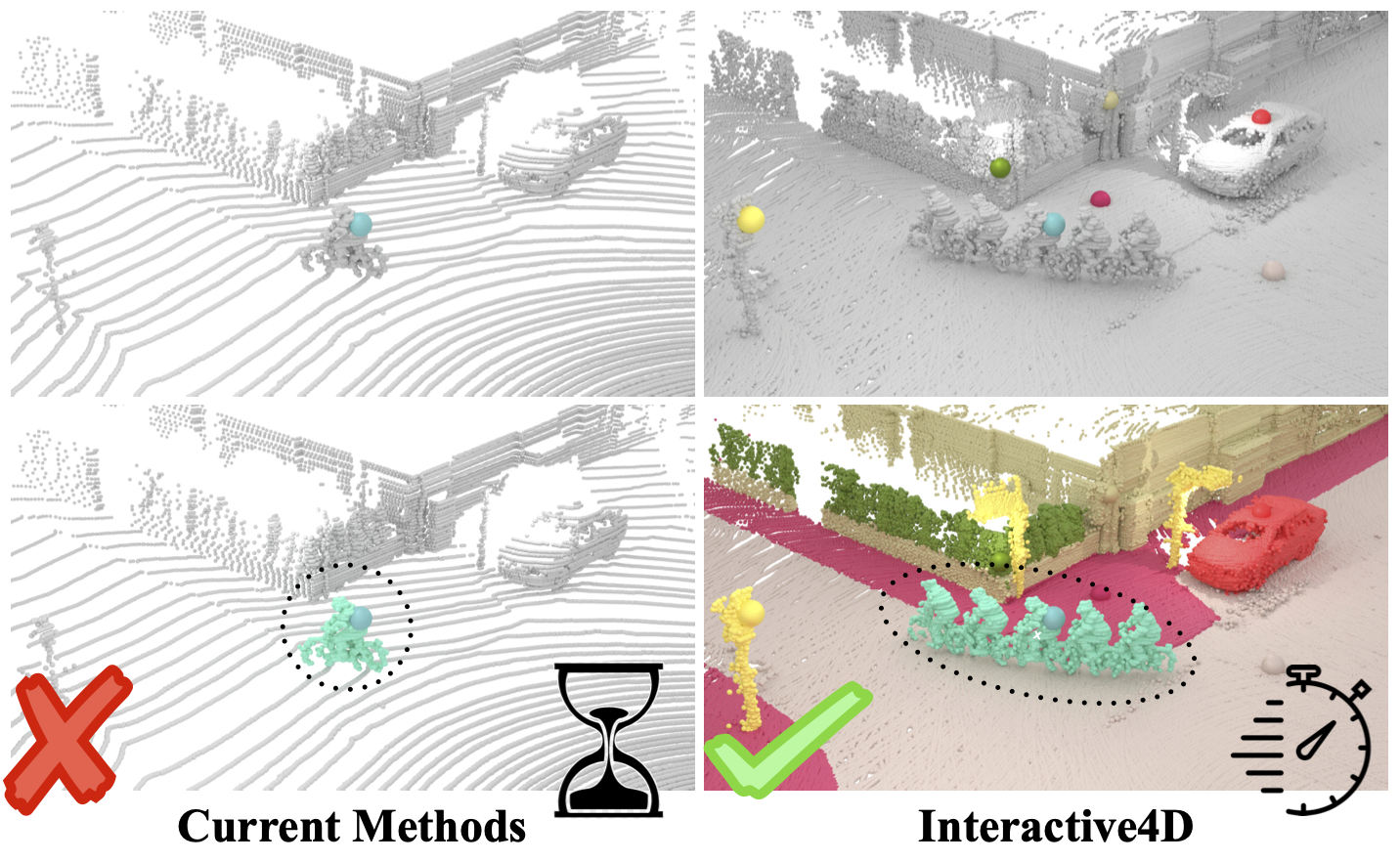
Interactive segmentation has an important role in facilitating the annotation process of future LiDAR datasets. Existing approaches sequentially segment individual objects at each LiDAR scan, repeating the process throughout the entire sequence, which is redundant and ineffective. In this work, we propose interactive 4D segmentation, a new paradigm that allows segmenting multiple objects on multiple LiDAR scans simultaneously, and Interactive4D, the first interactive 4D segmentation model that segments multiple objects on superimposed consecutive LiDAR scans in a single iteration by utilizing the sequential nature of LiDAR data. While performing interactive segmentation, our model leverages the entire space-time volume, leading to more efficient segmentation. Operating on the 4D volume, it directly provides consistent instance IDs over time and also simplifies tracking annotations. Moreover, we show that click simulations are crucial for successful model training on LiDAR point clouds. To this end, we design a click simulation strategy that is better suited for the characteristics of LiDAR data. To demonstrate its accuracy and effectiveness, we evaluate Interactive4D on multiple LiDAR datasets, where Interactive4D achieves a new state-of-the-art by a large margin.
@article{fradlin2024interactive4d,
title = {{Interactive4D: Interactive 4D LiDAR Segmentation}},
author = {Fradlin, Ilya and Zulfikar, Idil Esen and Yilmaz, Kadir and Kontogianni, Thodora and Leibe, Bastian},
journal = {arXiv preprint arXiv:2410.08206},
year = {2024}
}
OCCUQ: Efficient Uncertainty Quantification for 3D Occupancy Prediction
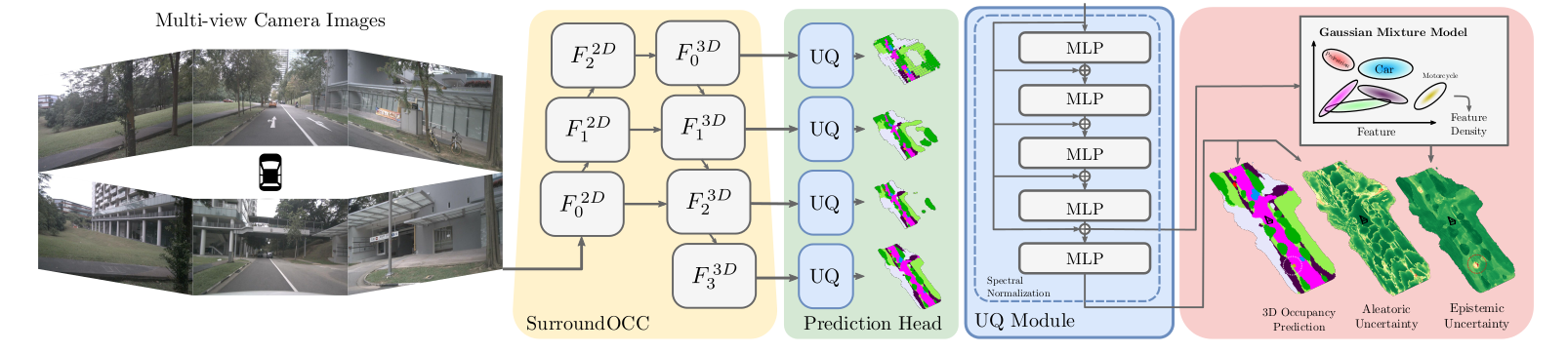
Autonomous driving has the potential to significantly enhance productivity and provide numerous societal benefits. Ensuring robustness in these safety-critical systems is essential, particularly when vehicles must navigate adverse weather conditions and sensor corruptions that may not have been encountered during training. Current methods often overlook uncertainties arising from adversarial conditions or distributional shifts, limiting their real-world applicability. We propose an efficient adaptation of an uncertainty estimation technique for 3D occupancy prediction. Our method dynamically calibrates model confidence using epistemic uncertainty estimates. Our evaluation under various camera corruption scenarios, such as fog or missing cameras, demonstrates that our approach effectively quantifies epistemic uncertainty by assigning higher uncertainty values to unseen data. We introduce region-specific corruptions to simulate defects affecting only a single camera and validate our findings through both scene-level and region-level assessments. Our results show superior performance in Out-of-Distribution (OoD) detection and confidence calibration compared to common baselines such as Deep Ensembles and MC-Dropout. Our approach consistently demonstrates reliable uncertainty measures, indicating its potential for enhancing the robustness of autonomous driving systems in real-world scenarios.
@inproceedings{heidrich2025occuq,
title={{OCCUQ: Exploring Efficient Uncertainty Quantification for 3D Occupancy Prediction}},
author={Heidrich, Severin and Beemelmanns, Till and Nekrasov, Alexey and Leibe, Bastian and Eckstein, Lutz},
booktitle="International Conference on Robotics and Automation (ICRA)",
year={2025}
}
Spotting the Unexpected (STU): A 3D LiDAR Dataset for Anomaly Segmentation in Autonomous Driving
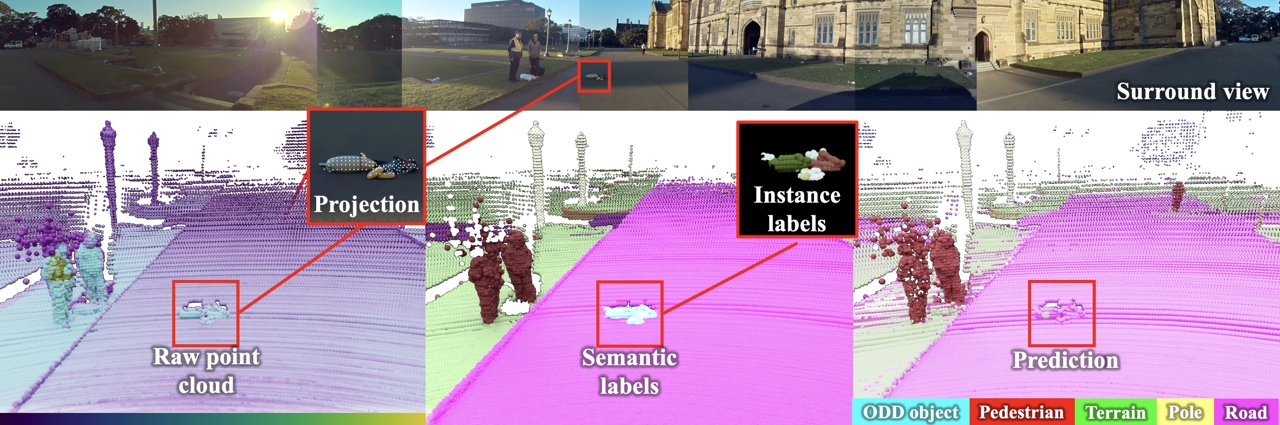
To operate safely, autonomous vehicles (AVs) need to detect and handle unexpected objects or anomalies on the road. While significant research exists for anomaly detection and segmentation in 2D, research progress in 3D is underexplored. Existing datasets lack high-quality multimodal data that are typically found in AVs. This paper presents a novel dataset for anomaly segmentation in driving scenarios. To the best of our knowledge, it is the first publicly available dataset focused on road anomaly segmentation with dense 3D semantic labeling, incorporating both LiDAR and camera data, as well as sequential information to enable anomaly detection across various ranges. This capability is critical for the safe navigation of autonomous vehicles. We adapted and evaluated several baseline models for 3D segmentation, highlighting the challenges of 3D anomaly detection in driving environments. Our dataset and evaluation code will be openly available, facilitating the testing and performance comparison of different approaches.
@inproceedings{nekrasov2025stu,
title = {{Spotting the Unexpected (STU): A 3D LiDAR Dataset for Anomaly Segmentation in Autonomous Driving}},
author = {Nekrasov, Alexey and Burdorf, Malcolm and Worrall, Stewart and Leibe, Bastian and Julie Stephany Berrio Perez},
booktitle = {{"Conference on Computer Vision and Pattern Recognition (CVPR)"}},
year = {2025}
}
Systematic Evaluation of Different Projection Methods for Monocular 3D Human Pose Estimation on Heavily Distorted Fisheye Images
Authors: Stephanie Käs, Sven Peter, Henrik Thillmann, Anton Burenko, Timm Linder, David Adrian, and Dennis Mack, Bastian Leibe
In this work, we tackle the challenge of 3D human pose estimation in fisheye images, which is crucial for applications in robotics, human-robot interaction, and automotive perception. Fisheye cameras offer a wider field of view, but their distortions make pose estimation difficult. We systematically analyze how different camera models impact prediction accuracy and introduce a strategy to improve pose estimation across diverse viewing conditions.
A key contribution of our work is FISHnCHIPS, a novel dataset featuring 3D human skeleton annotations in fisheye images, including extreme close-ups, ground-mounted cameras, and wide-FOV human poses. To support future research, we will be publicly releasing this dataset.
More details coming soon — stay tuned for the final publication! Looking forward to sharing our findings at ICRA 2025!
OoDIS: Anomaly Instance Segmentation Benchmark

Autonomous vehicles require a precise understanding of their environment to navigate safely. Reliable identification of unknown objects, especially those that are absent during training, such as wild animals, is critical due to their potential to cause serious accidents. Significant progress in semantic segmentation of anomalies has been driven by the availability of out-of-distribution (OOD) benchmarks. However, a comprehensive understanding of scene dynamics requires the segmentation of individual objects, and thus the segmentation of instances is essential. Development in this area has been lagging, largely due to the lack of dedicated benchmarks. To address this gap, we have extended the most commonly used anomaly segmentation benchmarks to include the instance segmentation task. Our evaluation of anomaly instance segmentation methods shows that this challenge remains an unsolved problem. The benchmark website and the competition page can be found at: https://vision.rwth-aachen.de/oodis
@article{nekrasov2024oodis,
title={{OoDIS: Anomaly Instance Segmentation Benchmark}},
author={Nekrasov, Alexey and Zhou, Rui and Ackermann, Miriam and Hermans, Alexander and Leibe, Bastian and Rottmann, Matthias},
journal={ICRA},
year={2025}
}
Previous Year (2024)
