
Profile

|
Dipl.-Inform. Esther Horbert |
Publications
Sequence-Level Object Candidates Based on Saliency for Generic Object Recognition on Mobile Systems

In this paper, we propose a novel approach for generating generic object candidates for object discovery and recognition in continuous monocular video. Such candidates have recently become a popular alternative to exhaustive window-based search as basis for classification. Contrary to previous approaches, we address the candidate generation problem at the level of entire video sequences instead of at the single image level. We propose a processing pipeline that starts from individual region candidates and tracks them over time. This enables us to group candidates for similar objects and to automatically filter out inconsistent regions. For generating the per-frame candidates, we introduce a novel multi-scale saliency approach that achieves a higher per-frame recall with fewer candidates than current state-of-the-art methods. Taken together, those two components result in a significant reduction of the number of object candidates compared to frame level methods, while keeping a consistently high recall.
Probabilistic Labeling Cost for High-Accuracy Multi-view Reconstruction
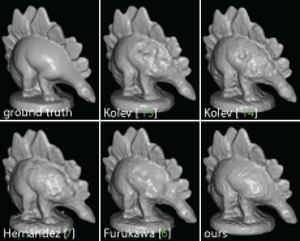
In this paper, we propose a novel labeling cost for multiview reconstruction. Existing approaches use data terms with specific weaknesses that are vulnerable to common challenges, such as low-textured regions or specularities. Our new probabilistic method implicitly discards outliers and can be shown to become more exact the closer we get to the true object surface. Our approach achieves top results among all published methods on the Middlebury DINO SPARSE dataset and also delivers accurate results on several other datasets with widely varying challenges, for which it works in unchanged form.
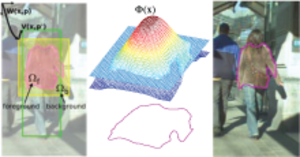
Level-Set Person Segmentation and Tracking with Multi-Region Appearance Models and Top-Down Shape Information
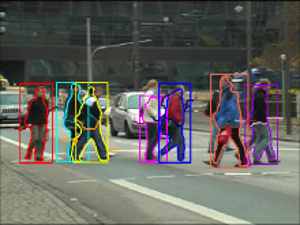
In this paper, we address the problem of segmentationbased tracking of multiple articulated persons. We propose two improvements to current level-set tracking formulations. The first is a localized appearance model that uses additional level-sets in order to enforce a hierarchical subdivision of the object shape into multiple connected regions with distinct appearance models. The second is a novel mechanism to include detailed object shape information in the form of a per-pixel figure/ground probability map obtained from an object detection process. Both contributions are seamlessly integrated into the level-set framework. Together, they considerably improve the accuracy of the tracked segmentations. We experimentally evaluate our proposed approach on two challenging sequences and demonstrate its good performance in practice.
@inproceedings{DBLP:conf/iccv/HorbertRL11,
author = {Esther Horbert and
Konstantinos Rematas and
Bastian Leibe},
title = {Level-set person segmentation and tracking with multi-region appearance
models and top-down shape information},
booktitle = {{IEEE} International Conference on Computer Vision, {ICCV} 2011, Barcelona,
Spain, November 6-13, 2011},
pages = {1871--1878},
year = {2011},
crossref = {DBLP:conf/iccv/2011},
url = {http://dx.doi.org/10.1109/ICCV.2011.6126455},
doi = {10.1109/ICCV.2011.6126455},
timestamp = {Thu, 19 Jan 2012 18:05:15 +0100},
biburl = {http://dblp.uni-trier.de/rec/bib/conf/iccv/HorbertRL11},
bibsource = {dblp computer science bibliography, http://dblp.org}
}
Multi-Person Tracking with Sparse Detection and Continuous Segmentation
This paper presents an integrated framework for mobile street-level tracking of multiple persons. In contrast to classic tracking-by-detection approa- ches, our framework employs an efficient level-set tracker in order to follow indi- vidual pedestrians over time. This low-level tracker is initialized and periodically updated by a pedestrian detector and is kept robust through a series of consis- tency checks. In order to cope with drift and to bridge occlusions, the resulting tracklet outputs are fed to a high-level multi-hypothesis tracker, which performs longer-term data association. This design has the advantage of simplifying short- term data association, resulting in higher-quality tracks that can be maintained even in situations where the pedestrian detector does no longer yield good de- tections. In addition, it requires the pedestrian detector to be active only part of the time, resulting in computational savings. We quantitatively evaluate our ap- proach on several challenging sequences and show that it achieves state-of-the-art performance.
@incollection{mitzel2010multi,
title={Multi-person tracking with sparse detection and continuous segmentation},
author={Mitzel, Dennis and Horbert, Esther and Ess, Andreas and Leibe, Bastian},
booktitle={ECCV},
pages={397--410},
year={2010},
}
Geometrically Constrained Level-Set Tracking for Automotive Applications
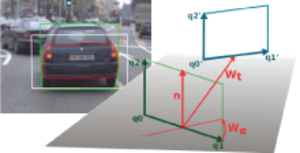
We propose a new approach for integrating geometric scene knowledge into a level-set tracking framework. Our approach is based on a novel constrained-homography transformation model that restricts the deformation space to physically plausible rigid motion on the ground plane. This model is especially suitable for tracking vehicles in automo- tive scenarios. Apart from reducing the number of parameters in the estimation, the 3D transformation model allows us to obtain additional information about the tracked objects and to recover their detailed 3D motion and orientation at every time step. We demonstrate how this in- formation can be used to improve a Kalman filter estimate of the tracked vehicle dynamics in a higher-level tracker, leading to more accurate ob- ject trajectories. We show the feasibility of this approach for an applica- tion of tracking cars in an inner-city scenario.
@incollection{horbert2010geometrically,
title={Geometrically constrained level set tracking for automotive applications},
author={Horbert, Esther and Mitzel, Dennis and Leibe, Bastian},
booktitle={Pattern Recognition},
pages={472--482},
year={2010},
}
